 资讯热线:
资讯热线:红外线反射式传感器在小车导航中的应用

广州市超毅电子今天又为广大朋友带来技术上的福利了,今天的福利是告诉你如何利用红外反射式传感器实现小车自动寻迹导航的设计,用以实现小车自动识别路线,判断并自动规避障碍,以及选择正确的路线。实验中采用与地面颜色有较大差别的线条作引导,使用反射式红外传感器感知导引线和判断障碍物。系统控制核心采用AT89C2051的单片机,系统驱动采用控制方式为单向PWM的直流电机。该技术可以应用于无人驾驶机动车,无人工厂、仓库、服务机器人等领域。
自第一台工业机器人诞生以来,机器人的发展已经遍及机械、电子、冶金、交通、宇航、国防等领域。近年来机器人的智能水平不断提高,并且迅速地改变着人们的生活方式。人们在不断探讨、改造、认识自然的过程中,制造能替代人劳动的机器一直是人类的梦想。
随着科学技术的发展,机器人的感觉传感器种类越来越多,其中视觉传感器成为自动行走和驾驶的重要部件。视觉的典型应用领域为自主式智能导航系统,对于视觉的各种技术而言图像处理技术已相当发达,而基于图像的理解技术还很落后,机器视觉需要通过大量的运算也只能识别一些结构化环境简单的目标。视觉传感器的核心器件是摄像管或CCD,目前的CCD已能做到自动聚焦。但CCD传感器的价格、体积和使用方式上并不占优势,因此在不要求清晰图像只需要粗略感觉的系统中考虑使用接近觉传感器是一种实用有效的方法。
机器人要实现自动导引功能和避障功能就必须要感知导引线和障碍物,感知导引线相当给机器人一个视觉功能。自动寻迹是基于自动导引小车(AGV—auto-guided vehicle)系统,实现小车自动识别路线,判断并自动规避障碍,选择正确的行进路线。采用与地面颜色有较大差别的线条作引导,使用传感器感知导引线和障碍判断。
传感器选择:
实现机器人的视觉和接近觉功能有多种方式:
1)可使用CCD摄像头进行图象采集和识别方法,但是不适用在小体积系统使用,并且还涉及图象采集、图象识别等领域。
2)电容式接近传感器,基于检测对象表面靠近传感元件时的电容变化。
3)超声波传感器,根据波从发射到接收的传播过程中所受到的影响来检测物体的接近程度。
4)红外反射式光电传感器,它包括一个可以发射红外光的固态发光二极管和一个用作接收器的固态光敏二极管(或光敏三极管)。
根据使用场合的具体情况,传感器要感知的对象是物体的有无和物体的接近程度,与精确的测距系统有相似之处,但又有不同,只要求判断出简单的阈值或提供远、近分档的距离。因此使用较简单的接近传感器实现小车寻迹和避障是有依据可循的并且是可行的。为了简单起见,系统中使用了八个红外反射式光电传感器,其中三个用于寻迹,三个用于障碍判断,两个用于主动轮测速。
红外反射式光电传感器特性与工作原理:
反射式光电传感器的光源有多种,常用的有红外发光二极管,普通发光二极管,以及激光二极管,前两种光源容易受到外界光源的干扰,而激光二极管发出的光的频率较集中,传感器只接收很窄的频率范围信号,不容易被干扰但价格较贵。理论上光电传感器只要位于被测区域反射表面可受到光源照射同时又能被接收管接收到的范围就能进行检测,然而这是一种理想的结果。因为光的反射受到多种因素的影响,如反射表面的形状、颜色、光洁度,日光、日光灯照射等不确定因素。如果直接用发射和接收管进行测量将因为干扰产生错误信号,采用对反射光强进行测量的方法可以提高系统的可靠性和准确性。红外反射光强法的测量原理是将发射信号经调制后送红外管发射,光敏管接收调制的红外信号,原理如下图所示:
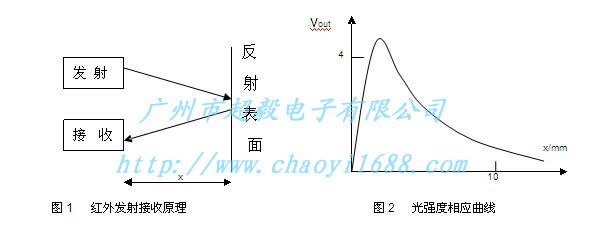
反射光强度的输出信号电压Vout 是反射面与传感器之间距离x的函数,设反射面物质为同种物质时,x与Vout 的响应曲线是非线性的,如图2所示。设定输出电压达到某一阈值时作为目标,不同的目标距离阈值电压是不同的。
具体设计与实现:
接近觉传感器应用场合不同选择不同,感觉的距离范围不同,可从几毫米到几米。对于自动寻迹和小车轮子的测速传感器,反射距离都在1cm左右,探测环境都在阴影之下,不易受到日光的干扰。因此,这两种探测的传感器都选用FS-359F反射红外传感器,048W型封装。该封装形状规则,便于安装。对于障碍物的检测,可以使用超声波传感器,效果也较好,但电路系统庞大,还需占用大量MCU时间。上文的激光传感器虽然性能不错,但价格较贵。从需要5—10cm垂直探测距离的要求来看,普通的红外反射式传感器又很难胜任。在对6个型号的传感器测试后,选用了价格、性能基本适合的043W封装的反射红外传感器。在使用约40mA的发射电流,没有强烈日光干扰(在有日光灯的房间里)探测距离能达8cm,完全能满足探测距离要求。红外传感器的电路有多种形式,在这里为了安装调试方便,我们采用了下图的电路形式。红外线光电传感器的电路。.png)
传感器的使用数量应该尽量少以减少单片机的信号处理量,寻迹小车一共安装有八个红外光电传感器,选用运算放大器LM324,光电传感器检测到的信号经放大器放大整形送微处理器判断、运算、控制。LM324是14脚DIP封装,内置四个运算放大器的集成器件,用两个LM324便能完成所有传感器与MCU的连接,并且电路简单,响应速度快,波形规则,调试简单。
寻迹用接近传感器安装位置下图所示,A、C传感器骑在黑线两测用于检测是否跑偏,B传感器在黑线范围内用于辅助检测,以确保小车机器人随时在以下图的状态运行。传感器状态决定下一步的运行方式,具体可参见程序设计中的相关内容。
.png)
测障碍传感器安装位置分别位于小车前、左、右三个方向,用于检测前方、左边和右边的障碍。测速度传感器安装在紧靠车轮两侧。
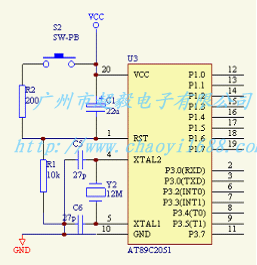
系统控制由微处理器完成,微处理器采用ATMEL公司的单片机AT89C2051,AT89C2051是一个只有20引脚的芯片,其相对AT89C51减少了两个对外端口P0和P2,适合于对端口数量要求不高的小型系统。由内部引脚可知P1.0和P1.1都没有内部上拉电阻,在需要对外输出电流时要外接上拉电阻,这点在设计时应该特别引起注意。各I/O口的最大吸收电流为25mA,能直接驱动LED。软件能与AT89C51系列兼容。综上所述,AT89C2051能够达到我们期望的功能和性能要求,图5给出了它的典型连接方式。其中VCC的电压范围为2.3V-6V,保证电源在较宽的范围使用。C1、R1、R2、S2构成上电/手动复位电路。
自主式寻迹、避障智能小车的硬件设
计包括了传感器测量电路、控制处理器电路、电机驱动电路、显示处理器电路,以及电源、显示部分。系统中采用了电机的专用驱动芯片L298N驱动直流电机,电机速度采用PWM方式进行脉宽调制控制。程序设计主要考虑稳定性、抗干扰性,主程序主要起到导向和决策功能,决定什么时候机器人该做什么。各种功能的实现通过调用具体的子程序,包括:寻迹、90°转向、直线前进、显示、延时、定时等。由于篇幅限制这里不再叙述。
红外反射式传感器在自主式寻迹、避障机器人上的应用说明,用光电传感器作为机器人的近距离感觉传感器是可行的,当距离小于10mm时,有较好的可靠性和抗干扰能力,而传感器的探头尺寸仅为几个毫米,特别适合小型化,在相应的智能控制系统中可进行有意义的尝试。光电传感器的显著特点是非接触、不受电的干扰、灵敏度高、时间分辨率和空间分辨率高,可进行全方位的测试。当然,单一传感器获得的信息非常有限,由于传感器受到自身性能的影响也带有不确定性。随着传感器种类的增多,一个强大的智能系统应该是一个多传感器系统,也是信息感知的新的研究方向。如果需要咨询更多的红外线光电传感器的资讯请联系官网客服:http://www.chaoyi1688.com

关于“”的相关资讯
| 我要评论: | |
|---|---|
| 内 容: | |
| 验证码: | (内容最多500个汉字,1000个字符) 看不清?! |
请注意: |
|
|
1.尊重网上道德,遵守中华人民共和国的各项有关法律法规,不发表攻击性言论。 2.承担一切因您的行为而直接或间接导致的民事或刑事法律责任。 3.新闻留言板管理人员有权保留或删除其管辖留言中的任意内容。 |

共有-条评论【我要评论】